एक तस्वीर से चंद्रमा की भू-आकृति कैसे निकालें — एक प्रायोगिक 2.5D पाइपलाइन
सारांश: मैं एक शोध परियोजना का वर्णन करता हूँ जो एकल कक्षीय तस्वीर से चंद्रमा की सतह का सापेक्ष ऊँचाई मानचित्र अनुमानित करने का प्रयास करती है। बिना स्टीरियोस्कोपी के, बिना मशीन लर्निंग के — केवल शास्त्रीय छाया विश्लेषण, चमक प्रवणता (brightness gradients), और भू-संदर्भित डेटा।
समस्या: 2D से 3D
चंद्रमा की सतह की हर तस्वीर 3D का 2D पर प्रक्षेपण है। ऊँचाई की जानकारी “समतल” हो जाती है। इसे पुनर्प्राप्त करने के लिए हमारे पास कुछ सुराग हैं:
- छायाएँ — छाया जितनी लंबी, वस्तु उतनी ऊँची (ज्ञात प्रकाश मापदंडों के साथ)
- चमक प्रवणता — चमक में अचानक परिवर्तन ढलानों का संकेत देते हैं
- अल्बीडो — सतह की सामग्री भी चमक बदलती है, जो उपरोक्त दोनों विश्लेषणों को जटिल बनाती है
समस्या यह है कि अल्बीडो और स्थलाकृति आपस में उलझी हुई (entangled) हैं। तस्वीर में एक चमकीला धब्बा हल्के रेगोलिथ का मैदान हो सकता है या सूर्य की ओर झुकी हुई ढलान। एक तस्वीर से इन्हें पूरी तरह अलग करना संभव नहीं है — यह एक मूलभूत भौतिक सीमा है। यह परियोजना इसे खुले तौर पर स्वीकार करती है और इसी सीमा के इर्द-गिर्द अपनी पूरी विश्वसनीयता प्रणाली बनाती है।
पाइपलाइन आर्किटेक्चर
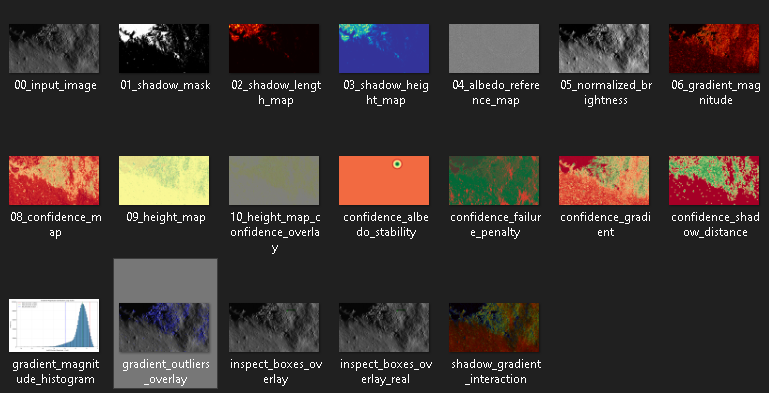
कोड 7 चरणों में विभाजित है, प्रत्येक चरण अपनी नैदानिक छवि उत्पन्न करता है:
चरण 1 — छाया पहचान
छाया मास्क एक शतमक (percentile) विधि (डिफ़ॉल्ट: सबसे गहरे 15% पिक्सेल) या मानक विचलन विधि से उत्पन्न होता है। यह एक अनुमानिक (heuristic) दृष्टिकोण है — गहरी सामग्री को गलती से छाया के रूप में वर्गीकृत किया जा सकता है।
01_shadow_mask.pngचरण 2 — छायाओं से ऊँचाई
छाया मास्क से छाया की लंबाई मापी जाती है और सापेक्ष ऊँचाइयों में बदली जाती है:
height = shadow_length_px × pixel_scale_m × tan(sun_elevation°)यह मान लिया गया है कि छाया बनाने वाली वस्तुएँ ऊर्ध्वाधर हैं। यह एक सन्निकटन है, लेकिन चट्टानों और क्रेटर किनारों के लिए पर्याप्त है।
02_shadow_length_map.png
03_shadow_height_map.pngचरण 3 — अल्बीडो मानचित्र
एल्गोरिदम तथाकथित inspect boxes — छोटी खिड़कियों से “अपेक्षित” पृष्ठभूमि चमक को प्रक्षेपित करता है जो ज्ञात भौगोलिक बिंदुओं पर सामग्री की चमक का नमूना लेती हैं। संस्करण 2.6 में इन खिड़कियों की स्थिति QuickMap डेटा से वास्तविक चंद्र निर्देशांकों (अक्षांश/देशांतर) से ली जाती है, यादृच्छिक रूप से नहीं रखी जाती।
04_albedo_reference_map.pngचरण 4 — चमक सामान्यीकरण
स्थलाकृति के प्रभाव को अलग करने के लिए देखी गई चमक को अपेक्षित अल्बीडो चमक से विभाजित किया जाता है:
normalized = observed / expected_albedo05_normalized_brightness.pngचरण 5 — प्रवणता
सामान्यीकृत चमक पर स्थानिक प्रवणता (परिमाण और दिशा) की गणना की जाती है। तीव्र प्रवणता ढलान का संकेत देती है; प्रवणता की दिशा ढलान के अभिविन्यास को दर्शाती है।
06_gradient_magnitude.png
07_gradient_direction.png ← HSV दृश्यांकन: वर्ण = दिशाचरण 6 — विश्वसनीयता मानचित्र (Confidence Map)
यह परियोजना का हृदय है। विश्वसनीयता मानचित्र 5 स्वतंत्र घटकों को जोड़ता है:
| घटक | क्या मापता है |
|---|---|
| Shadow distance | छाया किनारों से निकटता |
| Gradient | चमक प्रवणता की तीव्रता |
| Texture variance | स्थानीय प्रसरण (बनावट) |
| Albedo stability | inspect boxes से निकटता |
| Failure penalty | विश्लेषण के लिए स्वाभाविक रूप से अनुपयुक्त क्षेत्रों पर दंड |
अंतिम विश्वसनीयता मानचित्र = घटकों का भारित योग × विफल क्षेत्र दंड।
08_confidence_map.png ← हरा = उच्च विश्वसनीयता, लाल = निम्नचरण 7 — अंतिम ऊँचाई मानचित्र
छायाओं से प्राप्त ऊँचाइयों और प्रवणता-आधारित ढलानों को संयोजित किया जाता है। कम विश्वसनीयता वाले क्षेत्रों में परिणामों को माध्यिका की ओर समतल किया जाता है — ताकि शोर को भूभाग के रूप में प्रस्तुत करने से बचा जा सके।
09_height_map.png
10_height_map_confidence_overlay.png ← ऊँचाई + विश्वसनीयता अपारदर्शिता के रूप मेंइनपुट डेटा: QuickMap
परियोजना QuickMap (LROC, एरिज़ोना स्टेट यूनिवर्सिटी) के डेटा का उपयोग करती है:
- LROC NAC छवि — उच्च-रिज़ॉल्यूशन कक्षीय तस्वीर (पूर्ण रिज़ॉल्यूशन पर ~1 मी/पिक्सेल)
- Region Data CSV — QuickMap के माप बिंदु जिनमें शामिल हैं: भौगोलिक निर्देशांक (अक्षांश/देशांतर), भूभाग ऊँचाई (TerrainHeight), ढलान (Slope), ऑप्टिकल संरचना आदि
एक .vrt फ़ाइल (GDAL Virtual Dataset) भू-संदर्भन मेटाडेटा प्रदान करती है: निर्देशांक प्रणाली, भौगोलिक रूपांतरण, और पिक्सेल स्केल।
परियोजना के पुनरावर्तन (Iterations)
कोड तीन पुनरावर्तनों से गुज़रा, प्रत्येक ने एक नई परत जोड़ी:
पुनरावर्तन 2 — मूल पाइपलाइन (छायाएँ + प्रवणता + विश्वसनीयता मानचित्र)
पुनरावर्तन 2.5 — नैदानिक परत: विश्वसनीयता मानचित्र का 5 घटकों में विभाजन, प्रवणता हिस्टोग्राम, बाह्यमान (outlier) ओवरले, छाया-प्रवणता अंतःक्रिया। लक्ष्य: *”क्या मैं सही कारणों से पाइपलाइन पर भरोसा कर रहा हूँ?”*
पुनरावर्तन 2.6 — वास्तविक निर्देशांक: inspect boxes को यादृच्छिक रूप से नहीं बल्कि QuickMap डेटा का उपयोग करके रखा गया। अक्षांश/देशांतर → पिक्सेल मैपिंग रैखिक सन्निकटन द्वारा (बिना मानचित्र प्रक्षेपण सुधार के)।
पुनरावर्तन 3 (validate_iteration3.py) — प्रवृत्ति सत्यापन: प्रवणता दिशाओं की बाहरी DEM (LOLA/LROC) से तुलना। कोई अनुकूलन नहीं — केवल इस प्रश्न का उत्तर: *”क्या पुनर्निर्मित प्रवृत्तियाँ वास्तविक स्थलाकृति से मेल खाती हैं?”*
यह परियोजना क्या नहीं करती
यह सूची सुविधाओं की सूची जितनी ही महत्वपूर्ण है:
- DEM उत्पन्न नहीं करती — ऊँचाइयाँ सापेक्ष हैं, बिना निरपेक्ष संदर्भ के
- मशीन लर्निंग का उपयोग नहीं करती — हर चरण मनुष्य द्वारा व्याख्या योग्य है
- फ़ोटोग्रामेट्री नहीं है — कोई स्टीरियो जोड़ी नहीं, कोई त्रिकोणमिति नहीं
- मैदानों पर अच्छा काम नहीं करती — एकसमान क्षेत्र कोई स्थलाकृतिक संकेत उत्पन्न नहीं करते
- अल्बीडो और स्थलाकृति को पूरी तरह अलग नहीं करती — एकल छवि से यह असंभव है
परिणाम और सत्यापन
एक उदाहरण चंद्र क्षेत्र (7.63°N, 6.53°E) पर, पूर्ण LROC NAC रिज़ॉल्यूशन (1 मी/px) पर, सिंथेटिक DEM का उपयोग करके (परीक्षण के दौरान LOLA तक पहुँच नहीं थी) परीक्षण करने पर, पुनरावर्तन 3 का सत्यापन वर्गीकृत करता है:
- उच्च विश्वसनीयता वाले क्षेत्रों का लगभग 3.6% DEM प्रवृत्ति से मेल खाता है
- लगभग 17.7% मेल नहीं खाता
- शेष: निष्कर्ष निकालने के लिए विश्वसनीयता बहुत कम
परिणाम ईमानदारी से प्रस्तुत किए गए हैं — परियोजना इन संख्याओं को समझाने या “ठीक” करने का प्रयास नहीं करती। असंगति सूचना है, छिपाने योग्य त्रुटि नहीं।
संभावनाएँ और अनुप्रयोग
इस परियोजना द्वारा उपयोग किए जाने वाले डेटा के व्यापक संदर्भ का उल्लेख करना उचित है।
LROC NAC द्वारा ली गई चंद्रमा की सतह की तस्वीरें पृथ्वी के बाहर किसी भी खगोलीय पिंड की सतह का सबसे विस्तृत मानचित्रण हैं। ~1 मी/पिक्सेल के रिज़ॉल्यूशन पर प्रत्येक पिक्सेल एक वर्ग मीटर सतह के बराबर है — यह विस्तार का स्तर सौरमंडल के किसी अन्य ग्रह या उपग्रह के लिए अप्राप्य है। चंद्रमा पर वायुमंडल की अनुपस्थिति धुँधलापन और ऑप्टिकल विकृतियों को समाप्त करती है, जो छवि गुणवत्ता को और बढ़ाती है।
QuickMap LOLA (LRO Laser Altimeter) डेटा से पुनर्निर्मित 3D दृश्य भी प्रदान करता है। यह भूभाग आकृति की विस्तारित समझ देता है, लेकिन इस पाइपलाइन की तरह, सीमित दायरे में स्थलाकृति प्रस्तुत करता है — यह पूर्ण, सटीक फ़ोटोग्रामेट्री नहीं है।
और क्या निकाला जा सकता है
इस परियोजना का मुख्य सीमित आधार एक कोण से एकल छवि है। यदि उसी क्षेत्र की दो या अधिक तस्वीरें समान रिज़ॉल्यूशन और भिन्न प्रकाश कोणों पर उपलब्ध हों, तो विश्लेषण की संभावनाएँ काफ़ी बढ़ जाती हैं:
गमनीयता मूल्यांकन — न्यूनतम ढलान और कम शिलाखंडों वाले भूभाग की पहचान, रोवर मार्ग नियोजन के लिए उपयोगी।
रेगोलिथ मोटाई का अनुमान — शिलाखंडों की छायाएँ और उनका परिवेश से संबंध ढीली सतह परत की गहराई का संकेत दे सकते हैं।
शैल संरचना विश्लेषण — विभिन्न प्रकाश कोणों पर शिलाखंडों का वितरण और आकृति विज्ञान प्रारंभिक शैलविज्ञानिक (lithological) वर्गीकरण को संभव बनाता है।
यह सब अभी शोध का क्षेत्र है, कोई तैयार उपकरण नहीं। लेकिन प्रारंभिक बिंदु असाधारण रूप से अच्छा है: डेटा सार्वजनिक है, निःशुल्क है, और उच्चतम संभव गुणवत्ता का है।
कोड और लाइसेंस
Python कोड (~1,600 पंक्तियाँ, बिना बाहरी AI फ्रेमवर्क के) केवल इनका उपयोग करता है: numpy, opencv-python, scipy, matplotlib
सोर्स कोड GitHub पर सार्वजनिक रूप से उपलब्ध है: github.com/MarcinSFox/Lunar_2.5D
सभी चरण स्पष्ट और प्रलेखित हैं। प्रत्येक चरण अपनी नैदानिक छवि उत्पन्न करता है, जिससे यह समझना संभव होता है कि पाइपलाइन कहाँ अच्छा काम करती है और कहाँ विफल होती है।
परीक्षण डेटा: उदाहरण चंद्र क्षेत्र (~7.63°N, 6.53°E), QuickMap से LROC NAC छवि, स्केल ~1 मी/px।
मैं इस परियोजना को एक शोध प्रयोग और सीखने का उपकरण मानता हूँ। परिणाम भूभाग आकृति के बारे में परिकल्पनाएँ हैं, माप नहीं। परियोजना का मूल्य विधि की पारदर्शिता और अनिश्चितता के स्पष्ट प्रतिरूपण में है — परिणामों की सटीकता में नहीं।