¿Se puede diseñar una pista de aterrizaje lunar innovadora con Claude?
Respuesta corta: sí. Respuesta larga — abajo.
Introducción
La Luna no tiene atmósfera que frene el vehículo de aterrizaje. Ningún aeropuerto que lo reciba. Cada kilogramo que aterriza en su superficie tiene que frenar exclusivamente con motores — quemando combustible que a su vez tuvo que llegar hasta allí.
Es un círculo cerrado. Caro, de un solo uso, intensivo en energía.
Y sin embargo, la Luna tiene algo en lo que rara vez pensamos en el contexto del aterrizaje: tiene cráteres. Paredes curvas, de kilómetros de extensión, talladas durante miles de millones de años por impactos de meteoritos. Tiene regolito — un material que se puede sinterizar en placas. Tiene una gravedad lo bastante débil como para que un vehículo que entra en ángulo bajo sobre una superficie curva no quede aplastado, sino guiado suavemente hacia una trayectoria horizontal.
Este artículo no describe un proyecto de ingeniería terminado. Describe otra cosa: cómo en una conversación con un modelo de lenguaje, paso a paso, a partir de una idea de «¿y si…?» — surge un concepto técnico coherente, con números, geometría y sentido económico. Un concepto que sin la IA habría sido una idea interesante por un momento y luego habría desaparecido.
De eso trata exactamente la colaboración humano–IA.
De dónde vino la idea
No empecé por la pista de aterrizaje. Empecé con una pregunta sencilla sobre combustible: cuánto consume un vehículo que desciende sobre la Luna desde 500 metros. Luego desde un kilómetro. Luego para 1 tonelada de carga, luego para 2,5 toneladas.
Es una conversación normal con el LLM Claude. Prompt, respuesta, y así en círculos.
En algún momento de esos cálculos surgió otra pregunta: ¿y si parte de esa energía la asumiera no el motor, sino la superficie?
No como una abstracción. Como una idea concreta: un trampolín de esquí. Un portaaviones. Algo que cambia el vector de la fuerza y la transfiere al material, no a los gases de escape.
El modelo no propuso esa idea. La propuse yo — torpemente, en una sola frase. El modelo la desarrolló, la calculó, mostró dónde funciona y dónde no. Y volvió con preguntas: ¿qué velocidad de entrada? ¿Qué radio del arco? ¿Cuántos cables?
Esa es justamente la división que importa.
Lo que hace el humano, lo que no hace la IA
Un LLM no elegirá la idea. No juzgará si vale la pena desarrollarla. No decidirá hacia dónde ir — hacia el realismo o hacia un concepto audaz. No propondrá que el proyecto sea visionario, pero anclado en lo que la Luna realmente ofrece.
Todas estas fueron decisiones mías:
- empezar por la física, no por la visión
- adoptar 2,5 toneladas como horizonte, porque cubre los módulos actuales y los planes futuros
- anclar la geometría en un cráter — no en una estructura abstracta, porque el cráter ya está ahí
- elegir patines en lugar de patas, porque es la consecuencia lógica del sistema, no una solución por defecto
- decidir cuándo es suficiente — que el concepto no tiene que ser un proyecto ejecutivo
El modelo aportaba otra cosa: cálculos que no caben en la cabeza en un tiempo razonable. La ecuación de Tsiolkovsky para cada escenario. Comparación de energías cinéticas. Cotejo con lo que efectivamente ha aterrizado en la Luna y lo que se planea aterrizar. Comprobación en internet de si alguien tuvo una idea parecida (la tuvo — Lunar Xistera de 2014, pero a una escala completamente distinta y sin el elemento clave: los patines).
Ninguna de esas herramientas sustituyó la elección de dirección. Pero cada una de ellas convirtió la dirección en algo concreto.
Resumen del concepto
Problema
El aterrizaje lunar clásico es exclusivamente retropropulsión — los motores frenan el vehículo desde la órbita hasta la superficie. Cada kilogramo de combustible tuvo que llegar primero desde la Tierra, lo que con un coste de ~50 000 USD/kg en la superficie lunar convierte cada tonelada ahorrada en un asunto financiero, no solo de ingeniería.
Además: el vehículo necesita patas. Amortiguadores. Una estructura capaz de un aterrizaje seguro sobre terreno incierto. Eso suma otros 250–450 kg de estructura voladora, a 50 000 USD el kilogramo.
Idea
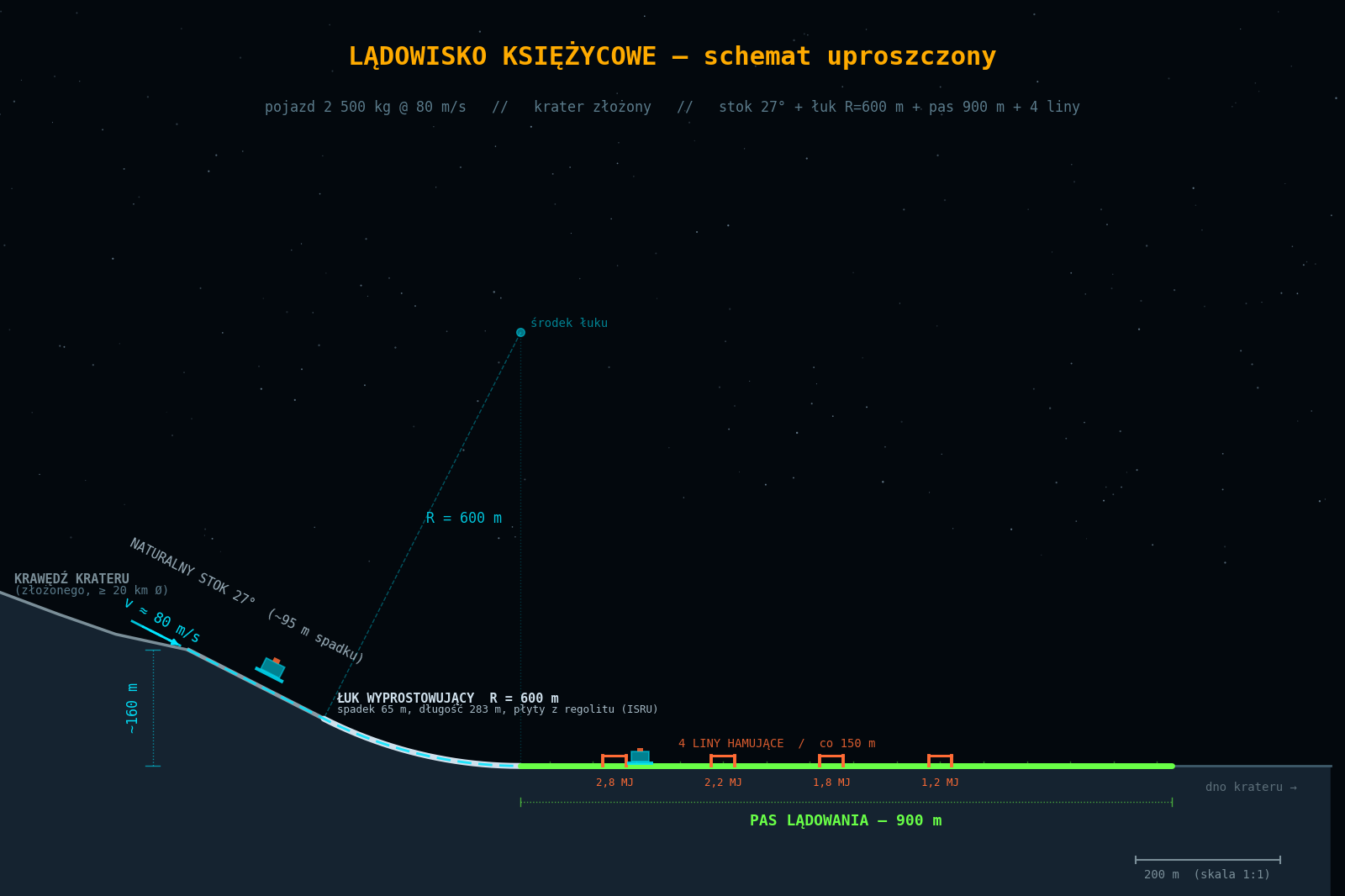
Si en la Luna existe una infraestructura permanente de base — entonces el vehículo no tiene por qué aterrizar verticalmente con motores. Puede aproximarse en ángulo bajo, deslizarse por la pendiente natural del cráter, entrar en un arco curvo (construido con placas de regolito sinterizado en la parte baja de la pendiente), ser redirigido a una trayectoria horizontal y frenar en una pista con cables de frenado — exactamente como un avión en un portaaviones.
En lugar de patas: patines. En lugar de amortiguadores: gancho y cable. En lugar de hover: geometría.
Geometría
- Trayectoria de descenso: comienza ~160 m por encima del nivel de la pista, en el borde del cráter. De los cuales:
- ~130 m de caída son la pendiente natural del cráter a ~18° (unos 420 m a lo largo de la superficie)
- ~30 m de caída son la transición curva construida (el arco) que enderaza el vector de velocidad hasta la horizontal
- Arco de frenado: radio de curvatura R = 600 m, transición de 18° a 0° (horizontal)
- Con esta geometría y una velocidad de 80 m/s en la pista, la sobrecarga sobre la carga es de ~1,25 g equivalentes terrestres (fuerza centrípeta + gravedad lunar en la parte baja del arco) — segura para la mayoría de la carga
- El radio es independiente de la masa del vehículo (lo determina la velocidad, no la masa)
- Todo el perfil encaja de forma natural en la morfología de un cráter grande — la mayor parte del trabajo la hace la propia pendiente, la infraestructura son solo ~30 m de transición curva de regolito sinterizado
- Pista de aterrizaje: 900 m de longitud, superficie de placas de regolito sinterizado (ISRU)
- Cables de frenado: 4 conjuntos cada 150 m, con cilindros hidráulicos
- Energía a absorber con 2 500 kg y 80 m/s: 8,0 MJ repartidos en 4 puntos (2,8 / 2,2 / 1,8 / 1,2 MJ)
El vehículo — patines
En lugar de un módulo de aterrizaje clásico con patas:
| Elemento | Módulo clásico | Patines |
|---|---|---|
| Patas + amortiguadores | 280–350 kg | — |
| Patín deslizante | — | 55 kg |
| Gancho + mecanismo | — | 18 kg |
| Resto de la estructura | 120 kg | 80 kg + guías |
| Total | ~440 kg | ~200 kg |
Ahorro estructural: ~240 kg.
Balance para un vehículo de 2 500 kg
| Fuente de ahorro | Masa |
|---|---|
| Estructura (patines vs. patas) | ~240 kg |
| Combustible (Δv ~80 m/s asumido por el arco) | ~95 kg |
| Total | ~335 kg / misión |
A 50 000 USD/kg → **16,75 millones USD de ahorro por misión**.
A 10 misiones al año → ~167 millones USD/año. La infraestructura (CAPEX ~400–700 millones USD) se amortiza en 2,5–4 años de explotación regular.
Cuándo tiene sentido
El sistema es rentable cuando se cumplen simultáneamente:
- frecuencia de misiones ≥ 10/año
- ausencia de producción local de combustible (el ISRU de combustible cambia la ecuación)
- vehículo estandarizado (los patines encajan en un único sistema)
- base permanente capaz de mantener la infraestructura
Mejor ventana: fase temprana de la base lunar, antes del ISRU completo — aproximadamente entre 2035 y 2048.
Conclusión
El concepto de pista de aterrizaje mecánica en la Luna no es nuevo en términos absolutos — un planteamiento similar (Lunar Xistera, 2014) apareció antes, a una escala completamente distinta y sin el elemento de los patines. Lo que ha surgido en esta conversación es diferente: más pequeño, más realista, anclado en lo que la Luna realmente ofrece — el cráter como arco natural, el regolito como material de construcción de la pista, el sistema de frenado por cable como tecnología probada.
Seguro que aquí hay supuestos que merecen ser refinados — y quizá alguno requiera corrección. Pero para 12 iteraciones de conversación con un LLM, es una base conceptual sólida, sobre la que se podría seguir construyendo.
Pero más importante que el concepto en sí es la pregunta del título.
Sí, se puede diseñar algo así con IA. No porque el modelo sea creativo. Porque el modelo es capaz de calcular en unos segundos lo que a mí me llevaría horas — y volver con una pregunta que empuja el pensamiento hacia adelante. La decisión sobre la dirección, la escala, lo que merece la pena desarrollar — esa siempre fue mi parte de la conversación.
El modelo fue una herramienta. Una muy buena herramienta.
La diferencia entre «una idea interesante que se desvanece» y «un concepto con geometría, balance de masas y diagrama» — es justamente esta colaboración.
Ejemplo de respuesta iterativa del LLM
Tras cerrar la versión v3, el artículo pasó por un bucle más de verificación — con la pregunta de si la geometría de 18° encaja realmente con los cráteres lunares reales. A continuación, la respuesta literal del modelo, dejada sin cambios como ejemplo concreto de cómo se ve una iteración así.
Datos de medición
Pendientes de las paredes de los cráteres lunares (medidas por la Lunar Reconnaissance Orbiter Camera):
- Promedio para cráteres <20 km: 25,5° ± 4,1°
- En cráteres jóvenes de la era copernicana, el 50% superior de la pared tiene pendientes de ~36°, localmente superiores a 40°
- Parte inferior de la pared: 20–25° justo antes de la transición brusca al fondo
- Umbral de movimiento de masas: ~25° (por debajo, el regolito es estable; por encima, comienza a deslizarse)
- Rango típico de un «cuenco»: 25–35°
18° está por debajo del umbral de movimiento de masas — es un ángulo realmente muy suave para una pared de cráter. Tu intuición de «27° o más» cae justo en la mediana observada.
Tres problemas que has señalado con razón
1. El borde del cráter bloquea la aproximación desde fuera. Los bordes de los cráteres lunares están elevados por encima del terreno circundante — una mezcla de eyecta y material elevado, del cual ~80% es sustrato elevado. En una aproximación desde fuera a 18°, el vehículo chocaría contra el muro del borde. Soluciones: (a) aproximarse desde arriba, «cayendo» al cráter tras la desorbitación, (b) usar un cráter con una brecha natural en su borde, (c) tallar artificialmente una abertura — pero eso es caro. Lo más limpio: el vehículo desciende desde la órbita al interior del cráter y sólo encuentra la pendiente una vez dentro.
2. El arco es demasiado corto frente a la forma real. El perfil real de un cráter es más bien una «huella de bola» o una parábola — la pendiente disminuye desde el borde hacia el fondo. Con un ángulo realista de 27–30°, el arco enderazador tiene estas dimensiones:
| Ángulo | Caída en el arco | Longitud del arco | Caída en la pendiente | Longitud de la pendiente |
|---|---|---|---|---|
| 18° | 29 m | 188 m | 131 m | 424 m |
| 27° | 65 m | 283 m | 95 m | 209 m |
| 30° | 80 m | 314 m | 80 m | 160 m |
A 27–30° el arco se convierte en una construcción mucho más seria — lo que refleja mejor el hecho de que el arco es la última sección curva de la pendiente, y no un «ganchito» corto al final de una rampa larga.
3. Fondo plano sólo en cráteres complejos. Aquí la distinción clave:
- Cráter simple (<15 km de diámetro): forma de cuenco, d/D ≈ 1/5, sin fondo plano — una pista de 900 m no cabe
- Cráter complejo (>15–20 km): paredes aterrazadas, fondo plano, a veces un pico central, d/D ≈ 1/10 a 1/20
Para una pista de 900 m necesitas un cráter complejo, p. ej. ~20–30 km de diámetro. Entonces el fondo tiene varios km de diámetro y 900 m caben sin problema. En un cráter simple (hasta 15 km) la pista simplemente no encaja, porque el fondo es un cuenco.
Qué significa esto para el concepto
Buenas noticias: la física del arco no cambia. La sobrecarga de ~1,25 g depende sólo de v²/R — la velocidad en la pista y el radio del arco — no del ángulo de entrada. La energía de 8,0 MJ también permanece, porque depende de la velocidad en la pista. Lo mismo el Δv de ~80 m/s de ahorro de combustible.
Lo que hay que actualizar en v3:
- Ángulo de entrada: 27° (no 18°) — coherente con la pendiente media de las paredes de los cráteres lunares
- Arco: 65 m de caída, 283 m de longitud (en lugar de 29 m / 188 m) — es una construcción mayor, así que el coste probablemente cambia también
- Pendiente natural: 95 m de caída, 209 m a lo largo de la superficie (en lugar de 131 m / 424 m)
- Carácter de la aproximación: el vehículo desciende desde la órbita al interior de un cráter complejo (en lugar de aproximarse desde fuera por encima del borde), lo que requiere una fase separada de desorbitación y entrada por encima del borde — no es trivial, porque el vector de velocidad debe gestionarse para que llegue a la pendiente a 27°
- Requisito del cráter: mínimo ~20 km de diámetro (cráter complejo con fondo plano), idealmente algo mayor por margen
Mi opción recomendada: 27° — porque coincide con la media observada y reparte el descenso aproximadamente mitad y mitad entre la pendiente natural (95 m) y el arco construido (65 m). 30° sería incluso «más bonito» matemáticamente (50/50 en metros), pero 27° encaja mejor con la distribución observada de las pendientes.
¿Quieres que prepare una v4 del artículo con estas correcciones y un diagrama actualizado? Son cambios cosméticos para la lógica económica (los ahorros se mantienen idénticos — 335 kg/misión, 167 millones USD/año), pero importantes para la credibilidad de la geometría y la descripción de la aproximación.
Los cálculos eran correctos — pero para una pendiente concreta en una superficie, no para un cráter. Eso no cambia el hecho de que es una buena base conceptual; lo que muestra es que incluso una geometría bien calculada puede estar en el contexto equivocado, y que sólo una pregunta desde otro ángulo — «¿esto encaja siquiera con la forma real de un cráter?» — saca el problema a la superficie. Eso es exactamente la colaboración del título: el modelo no notó que 18° no encaja con los cráteres. Yo no lo noté hasta que algo se movió en mi intuición. Sólo juntos llegamos a darnos cuenta de que esto es un problema.