能否與 Claude 一起設計創新的月球著陸場?
簡短回答:可以。完整回答 — 詳見下文。
引言
月球沒有可以為著陸載具減速的大氣。沒有迎接它的機場。每一公斤降落到月面的物體,都必須只靠引擎來煞車 — 燃燒著本身也得先飛抵月球的燃料。
這是一個閉合的循環。昂貴、一次性、能源密集。
然而月球擁有一樣我們在著陸的脈絡中很少想到的東西:它擁有隕石坑。經過數十億年隕石撞擊雕刻而成的、彎曲的、寬達數公里的坑壁。它擁有月壤 — 一種可以燒結成板的材料。它擁有夠弱的重力,使得以小角度進入彎曲表面的載具不會被壓碎,而是被輕緩地導向水平軌跡。
這篇文章不是一份完成的工程計畫。它描述的是另一件事:在與語言模型的對話中,一步一步,從「如果……」這樣的想法出發 — 如何形成一個有數字、有幾何、有經濟意義的、自洽的技術概念。一個若沒有 AI 就會作為一閃即逝的有趣念頭、然後消失的概念。
人類與 AI 的協作,正是關於這件事。
這個想法從何而來
我並不是從著陸場開始的。我是從一個關於燃料的簡單問題開始的 — 一艘載具從 500 公尺高處下降到月球,會燒掉多少燃料。然後是從 1 公里。然後是 1 公噸載荷,然後是 2.5 公噸。
這就是與 LLM Claude 的一場普通對話。提示、回應,如此循環。
在那些計算之間的某處,另一個問題冒了出來:如果這份能量的一部分不是由引擎、而是由表面承受呢?
不是當作抽象的想法。而是當作一個具體的念頭:滑雪跳台。航空母艦。某種能夠改變力的向量、並把它傳遞到材料而非排氣裡的東西。
這個想法不是模型提出的。是我提出的 — 笨拙地、用一句話。模型把它擴展、計算、展示出哪裡可行哪裡不可行。然後帶著問題回來:進入速度多少?弧的半徑多少?多少條纜索?
正是這樣的分工最重要。
人類做什麼,AI 不做什麼
LLM 不會挑選想法。不會評斷它是否值得發展。不會決定要往哪個方向去 — 是走向現實主義還是走向大膽的概念。不會主動建議:這個專案應該前瞻、卻又紮根於月球真正所擁有的條件。
這些全是我的決定:
- 從物理學出發,而非從願景出發
- 把 2.5 公噸當作目標規模,因為這個範圍涵蓋今天的著陸器與明天的計畫
- 把幾何錨定在隕石坑上 — 而不是抽象的構造,因為隕石坑本就在那裡
- 選擇滑橇而非著陸腳,因為這是系統的邏輯延伸,而不是預設答案
- 決定何時夠了 — 概念不必是一份施工級設計
模型貢獻的是另一些東西:那些在腦中無法在合理時間內完成的計算。對每個情境的齊奧爾科夫斯基方程式。動能比較。與真正在月球上著陸過、以及預定要著陸的載具的對照。在網路上查證是否有人想過類似的點子(有 — 2014 年的 Lunar Xistera,但規模完全不同,而且少了關鍵元素:滑橇)。
這些工具沒有一個可以取代方向的選擇。但每一個都把方向變成了某種具體的東西。
概念摘要
問題
傳統的月球著陸完全依賴反推進 — 引擎把載具從軌道一路煞到月面。每一公斤燃料都得先從地球運送過去,這在月面 ~50,000 美元/公斤的成本下,使得每一噸節省下來的質量都是一個財務問題,而不只是工程問題。
此外:載具需要著陸腳。需要避震器。需要能在不確定地形上安全觸地的結構。這又是 250–450 公斤的飛行結構,每公斤 50,000 美元。
構想
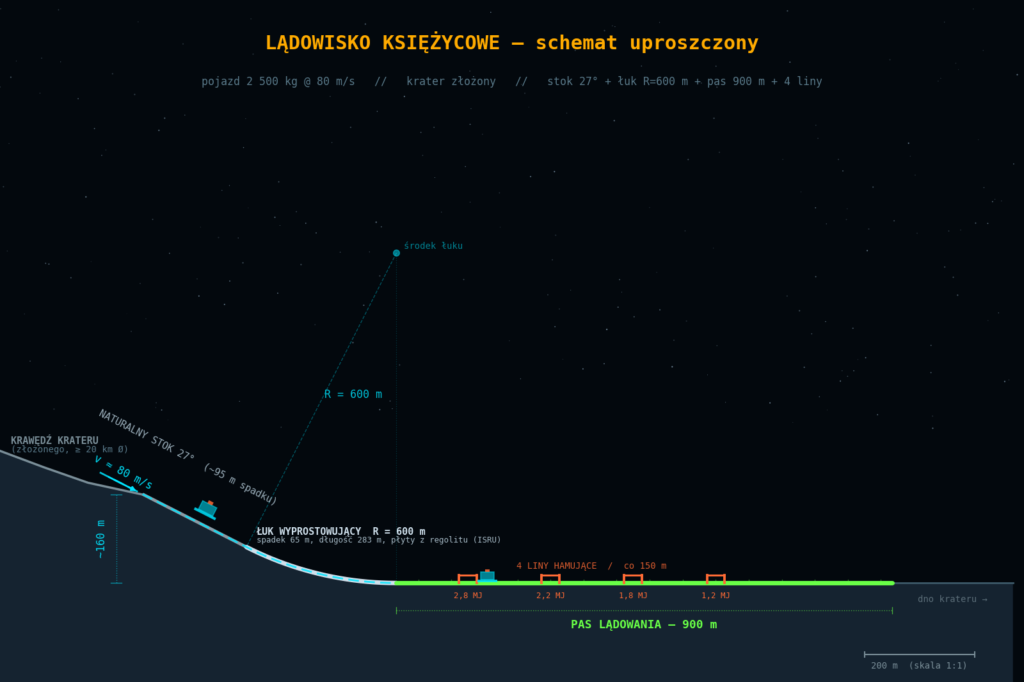
如果月球上存在常設基地的基礎設施 — 那麼載具就不必依賴引擎垂直著陸。它可以以小角度進場,沿著隕石坑的天然斜坡滑下,進入一段彎曲的弧(在斜坡下端用燒結月壤板建造),被導向水平軌跡,並在裝有攔阻索的跑道上煞停 — 完全像是航空母艦上的飛機。
不要著陸腳:要滑橇。不要避震器:要鈎與索。不要懸停:要幾何。
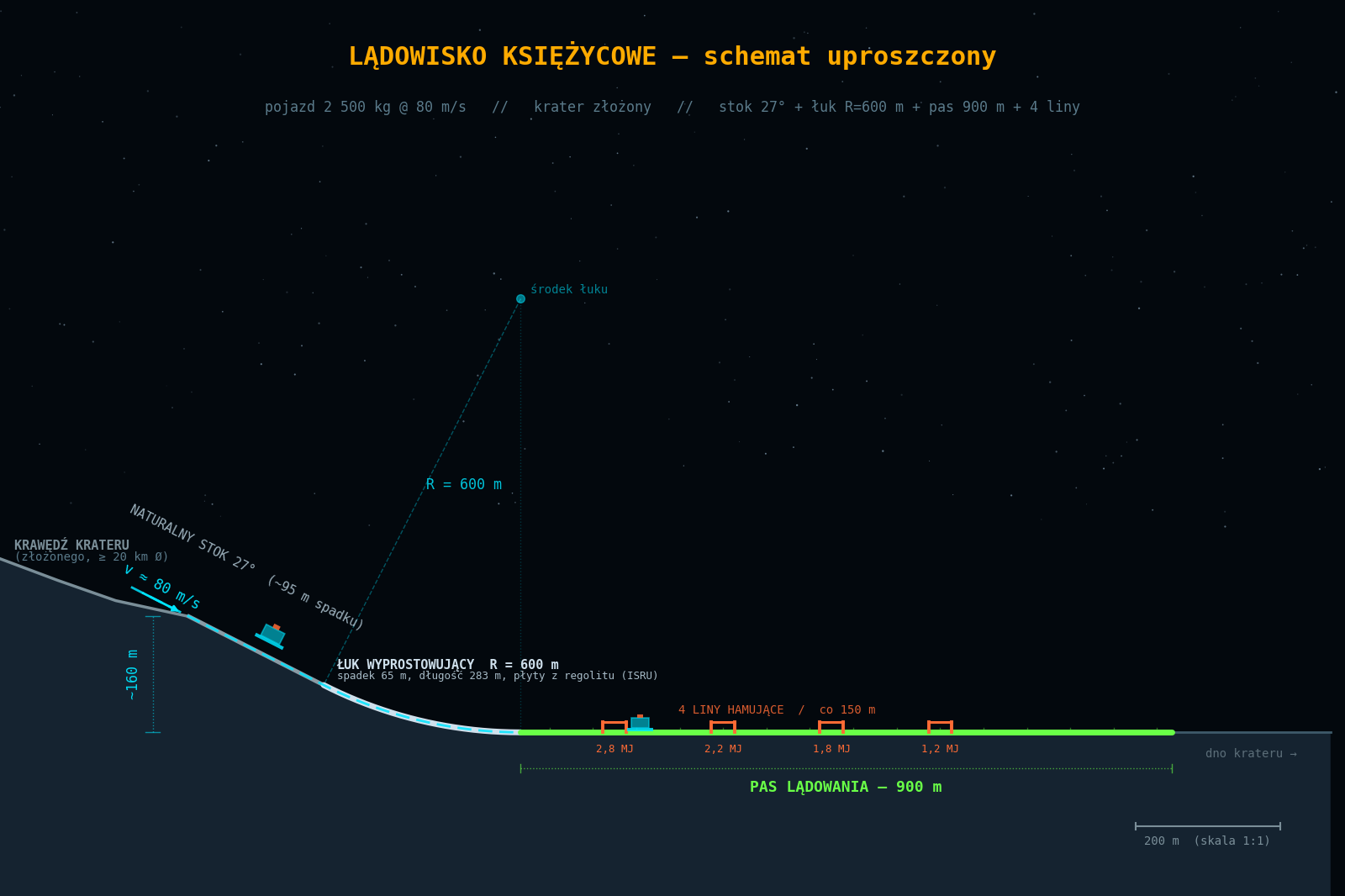
幾何
- 下降軌跡:從跑道平面以上 ~160 公尺處、隕石坑邊緣開始。其中:
- ~130 公尺的高度差是 ~18° 的天然隕石坑斜坡(沿表面約 420 公尺)
- ~30 公尺的高度差是建造的彎曲過渡段(弧),把速度向量導正為水平
- 制動弧:曲率半徑 R = 600 公尺,由 18° 過渡到 0°(水平)
- 在此幾何與跑道上 80 公尺/秒的速度下,貨物所受的負載為 ~1.25 g 地球當量(弧底處的向心力 + 月球重力)— 對絕大多數貨物而言屬安全範圍
- 半徑與載具質量無關(決定半徑的是速度,而非質量)
- 整段剖面自然地嵌入大型隕石坑的地形 — 大部分工作由斜坡本身完成,基礎設施只是 ~30 公尺的彎曲過渡段,用燒結月壤板建造
- 跑道:長 900 公尺,表面為燒結月壤板(ISRU)
- 攔阻索:每 150 公尺 4 組,配備液壓缸
- 2,500 公斤、80 公尺/秒下需吸收的能量:8.0 MJ,分配到 4 個點(2.8 / 2.2 / 1.8 / 1.2 MJ)
載具 — 滑橇
代替帶著陸腳的傳統著陸器:
| 元件 | 傳統著陸器 | 滑橇 |
|---|---|---|
| 著陸腳 + 避震器 | 280–350 公斤 | — |
| 滑橇底板 | — | 55 公斤 |
| 鈎 + 機構 | — | 18 公斤 |
| 其餘結構 | 120 公斤 | 80 公斤 + 導軌 |
| 合計 | ~440 公斤 | ~200 公斤 |
結構節省:~240 公斤。
2,500 公斤載具的收支
| 節省來源 | 質量 |
|---|---|
| 結構(滑橇 vs. 著陸腳) | ~240 公斤 |
| 燃料(Δv ~80 公尺/秒由弧吸收) | ~95 公斤 |
| 合計 | ~335 公斤 / 任務 |
以 ~50,000 美元/公斤計 → 每次任務節省 ~16.75 百萬美元。
每年 10 次任務 → 每年 ~167 百萬美元。 基礎設施(CAPEX ~400–700 百萬美元)在常態運作 2.5–4 年內回本。
何時才合理
當以下條件同時成立時,這套系統具有經濟效益:
- 任務頻率 ≥ 每年 10 次
- 沒有當地燃料生產(燃料 ISRU 會改變方程式)
- 標準化載具(滑橇須與單一系統相容)
- 能維持基礎設施的常設基地
最佳時機:完全 ISRU 之前的月球基地早期階段 — 大致為 2035–2048 年。
結語
月球上的機械式著陸場概念,在絕對意義上並不算新 — 類似的思路(Lunar Xistera, 2014)此前已經出現過,只是規模完全不同,而且少了滑橇這個元素。在這場對話中浮現的東西不一樣:更小、更現實、紮根於月球真正擁有的條件 — 隕石坑作為天然的弧、月壤作為跑道的建材、纜索式制動作為已被驗證的技術。
這裡肯定還有值得修正的假設 — 也許還有需要更正的部分。但對於與 LLM 的 12 輪對話而言,這已是一個相當紮實的概念基礎,可以在其上繼續往前建構。
但比概念本身更重要的,是標題裡的那個問題。
是的,這樣的東西可以與 AI 一起設計。不是因為模型有創造力。而是因為模型可以在數秒之內算完我獨自要花上數小時的計算 — 並帶著一個推著思考往前走的問題回到對話裡。關於方向、規模、什麼值得深入發展的決定 — 這部分始終都是我這一邊的事。
模型是一個工具。一個非常好的工具。
「一個會消失的有趣想法」與「一個有幾何、質量收支與圖示的概念」之間的差別 — 正是這場協作。
範例:LLM 的迭代回應
v3 版本完成之後,這篇文章又走過一輪檢查 — 帶著一個問題:18° 的幾何到底符不符合真實的月球隕石坑。以下是模型的回應原文,原樣保留,作為這類迭代具體模樣的一個實例。
測量數據
月球隕石坑壁的坡度(由 Lunar Reconnaissance Orbiter Camera 量測):
- 直徑 <20 公里隕石坑的平均值:25.5° ± 4.1°
- 在新鮮的哥白尼期隕石坑中,坑壁上半部 50% 的坡度約為 ~36°,局部超過 40°
- 坑壁下段:在與底部劇烈相接前約為 20–25°
- 質量崩移閾值:~25°(低於此值月壤穩定,高於此值便開始下滑)
- 「碗狀」隕石坑的典型範圍:25–35°
18° 落在質量崩移閾值之下 — 對隕石坑壁而言這真的是非常平緩的角度。你「27° 或更多」的直覺,正好命中觀測到的中位數。
你正確指出的三個問題
1. 隕石坑邊緣會擋住從外側進場的路徑。 月球隕石坑的邊緣比周圍地形抬升得更高 — 它由噴出物(ejecta)與被抬升的基底(uplift)混合而成,其中 ~80% 是被抬升的基岩。在 18° 從外側進場的情況下,載具會撞上邊緣的牆。解法:(a) 從上方進入,在去軌之後「掉」進坑裡;(b) 利用邊緣有天然缺口的隕石坑;(c) 人工開鑿出缺口 — 但這很貴。最乾淨的做法:載具從軌道下降進入隕石坑內部,到了裡面才會遇到斜坡。
2. 弧相對於真實形狀來說太短。 真實的隕石坑剖面更像「球體的壓痕」或一條拋物線 — 坡度自邊緣向坑底逐漸減小。在較為現實的 27–30° 角度下,導正用的弧具有以下尺寸:
| 角度 | 弧上落差 | 弧長 | 斜坡落差 | 斜坡長度 |
|---|---|---|---|---|
| 18° | 29 公尺 | 188 公尺 | 131 公尺 | 424 公尺 |
| 27° | 65 公尺 | 283 公尺 | 95 公尺 | 209 公尺 |
| 30° | 80 公尺 | 314 公尺 | 80 公尺 | 160 公尺 |
在 27–30° 時,弧成為一個重得多的構造物 — 這更貼近事實:弧是斜坡上最後那段彎曲段,而不是長坡道末端的一段短「夾子」。
3. 平坦的底部只存在於複雜隕石坑。 這裡有個關鍵區分:
- 簡單隕石坑(直徑 <15 公里):碗狀,d/D ≈ 1/5,沒有平坦底部 — 900 公尺的跑道塞不下
- 複雜隕石坑(>15–20 公里):階梯式坑壁、平坦底部,有時還有中央山峰,d/D ≈ 1/10 至 1/20
要放下 900 公尺的跑道,需要一個複雜隕石坑,例如直徑 ~20–30 公里。這樣坑底會有數公里寬,900 公尺毫不勉強。在簡單隕石坑(最多 15 公里)裡,跑道根本放不下,因為底部就是個碗。
這對概念意味著什麼
好消息:弧的物理沒有改變。~1.25 g 的負載係數只取決於 v²/R — 跑道上的速度與弧的半徑 — 與進入角度無關。8.0 MJ 的能量也維持不變,因為它取決於跑道上的速度。Δv ~80 公尺/秒的燃料節省也是。
需要在 v3 中更新的內容:
- 進入角度:27°(不是 18°) — 與月球隕石坑壁的平均坡度一致
- 弧:落差 65 公尺、長度 283 公尺(取代 29 公尺 / 188 公尺)— 這是個更大的構造,所以成本估算大概也會跟著調整
- 天然斜坡:落差 95 公尺、沿表面 209 公尺(取代 131 公尺 / 424 公尺)
- 進場的性質:載具從軌道下降進入複雜隕石坑(而非從外側越過邊緣進場),這需要一個獨立的去軌與越邊緣進入階段 — 並不簡單,因為必須把速度向量管理到能在 27° 上落到斜坡
- 隕石坑要求:直徑至少 ~20 公里(具有平坦底部的複雜隕石坑),最好略大以保留餘裕
我推薦的方案:27° — 因為它命中觀測平均,並且把下降大致對半分到天然斜坡(95 公尺)與建造的弧(65 公尺)。30° 在數學上會更「漂亮」(公尺數 50/50),但 27° 更貼合觀測到的坡度分佈。
要我準備一份帶入這些修正、並更新圖示的 v4 嗎?對經濟邏輯來說這是表面上的更動(節省金額不變 — 每次任務 335 公斤,每年 167 百萬美元),但對幾何的可信度與進場敘述來說,是相當大的更動。
計算是正確的 — 但對的是某個表面上的特定斜坡,而不是隕石坑。這並不改變它仍是一個良好概念基礎的事實;它顯示的是:即使是計算正確的幾何,也可能被擺在錯誤的脈絡裡,而只有從另一個方向提出的問題 — 「這真的合得上隕石坑的實際形狀嗎?」 — 才能把問題拉到水面上來。這正是標題所說的協作:模型沒有注意到 18° 不適合隕石坑。我也是在直覺微微跳動之後才注意到。我們是一起,才走到「這是個問題」的這個察覺上。